Der Ort, an dem zwei Kommunikationspartner Infor-mamationen austauschen, wird als Schnittstelle (engl. Interface (IF)) bezeichnet. Damit auch unterschiedliche Partner kommunizieren, muss dieser Übergabeort genau spezifiert sein. Die Informationen selbst sind normiert, damit sie von den Partnern „verstanden“ auch werden.
Quelle: Hardeware-Zone
⇓ Menü
Menü
In der Computertechnik gibt es eine Reihe ganz unterschiedliche Partner-Konstellationen:
Maschinen Interface (MI): unterschiedliche technische Geräte tauschen Informationen aus,
Network Interchange Connector (NIC): Maschine kommuniziert mit einem Netzwerk,
Menschen untereinander: ggf. über Moderator/Übersetzer, zwischen Abteilungen, in Projekten
Mensch-Maschine Interface (MMI),
Brain-Computer Interface: spannender Entwicklungsstrang. (Kurzer Einblick – hier – )
Diese Seite befasst sich nur mit den Maschinen Interfaces (MI)
Inhalt
Schnittstellen
Für eine Schnittstelle müssen die mechanischen (Steckverbindung) und elektrischen (Signal- übertragung) Eigenschaften definiert sein. Zwischen den Steckverbindungen können auch Übertragungsmedien (Kupferkabel, Glasfaser, Funk) eingefügt sein. Das ermöglicht dann die Übertragung an Geräte, die sich an verschiedenen Orten befinden.
… verbinden zwei Geräte miteinander.
Egal, ob intern oder extern angeschlossen, die verschiedenen Bestandteile des Computers müssen untereinander Daten austauschen und sie von einem Ort zum Anderen transportieren. Das geschieht über standardisierte Verbindungen und Leitungen – eben über Schnittstellen und Bussysteme.
Es gibt eine Vielzahl solcher Busse und Schnittstellen. Außerdem unterliegen sie einem rapiden technischen Wandel, der neue Typen aufkommen und andere verschwinden lässt.
Über Schnittstellen sind die Geräte mit einem gemeinsamen Transportsystem verbunden. Alle Geräte können so Informationen untereinander austauschten. Ein BUS arbeitet nur mit digitalen Signalen. Außerdem muss nun geregelt werden, wer wann auf den BUS zugreifen darf (=senden) und was passiert, wenn es zu Fehlern kommt.
… verbindet viele Geräte miteinander.
Es gibt eine Vielzahl unterschiedlicher BUS-Syteme. Sie sind den jeweiligen Erfordernissen angepasst – und unterliegen auch einem stetigen Fortschritt, der sich immer wieder aus der Verfügbarkeit neuer Technologien ergibt.
BUS-Systeme gibt es in einzelnen Chips, auf dem Mainboard, und am Anschlussfeld gibt es Zugang.
Man unterscheidet zwei grundsätzliche Architekturen- und versteht damit den funktionalen als auch physischen Aufbau.
BUS-Architekturen
Quelle: YOUTUBE (Zeit: 5:36 min.)
Ein englischsprachiger Überblick über die Unterschiede, Eigenschaften und Anwendung von Parallelbus und seriellen BUS-Systeme in Computern.
Geht schon recht tief in Detail!
Parallel-BUS
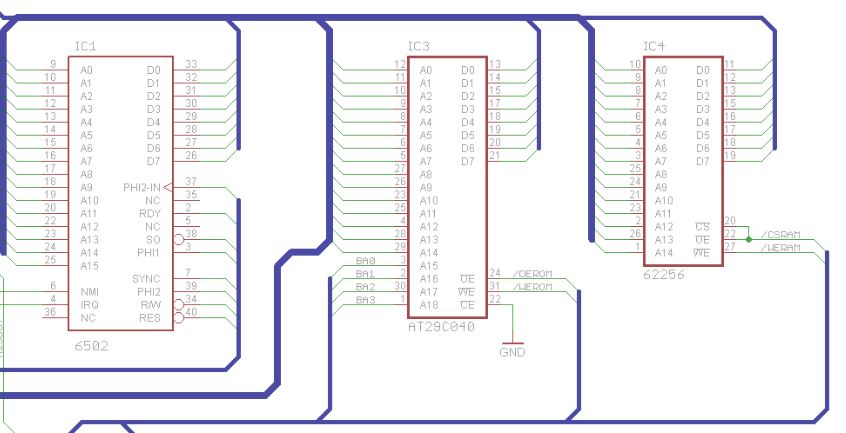
Der Parallel-BUS besteht aus einer Vielzahl von Leitungen, an denen die Bauteile gemeinsam angeschlossen sind. Auf Schaltplänen sind diese dann durch eine dicke Linie angedeutet. Aus wieviel Leitungen der BUS besteht, wird häufig mit einem kleinen Querstrich und einer Zahl daran angegeben.
Auch die Grundbausteine eines Computers sind so untereinander verbunden. Jede Leitung kann also spannungsführend sein, was einer logischen 1 entspricht, oder durch die Spannung (0V) eine logische 0 darstellt. Über die gemeinsame Masseleitungen sind alles Stromkreise geschlossen.
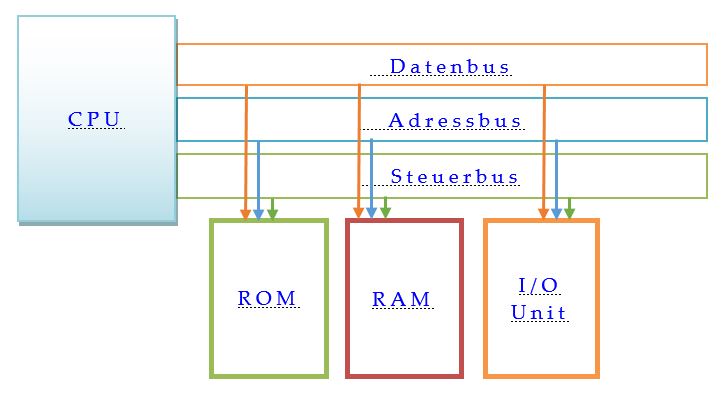
In der Computertechnik heißt so ein gesamtes Bündel von Leitungen dann „Systembus“. Aus Sicht der Architektur gehört er dem Parallel-BUS System an. Seine Leitungen ordnen sich eine von drei Gruppen an:
Datenbus/data bus: Binäre Signale übertragen die eigentliche Information.
Adressbus/address bus: Binäre Adresse, von wo Daten übertragen oder abgelegt werden sollen.
Steuerbus/control bus: Einzelne Leitung zur Ablaufsteuerung und Behandlung von (Sonder-)Zuständen wärend des Ablaufs/Fehler im System.
Unterscheidung der Richtungen, in die Daten übertragen werden (CPU-Gerät):
bidirektional: Daten in beide Richtungen: Datenbus, Steuerbus
unidirektional: Daten nur in eine Richtung: Adressbus (CPU steuert also Adressbus).
3 Beispiele: Parallel-BUS
Prozessorbus - in der CPU
Frontsidebus (FSB) - CPU-Chipset
PCIe - Anschluss Erweiterungskarten
Serieller BUS
Der serielle BUS benötigt wesentlich weniger Dateitungen. Auf einem Aderpaar übertrgt dieser jedes Bit der Reihe nach. Drüber hinaus befinden sich ggf. noch Energieversorgungsleitungen im gleichen Kabel.
Dazu werden die Daten in Pakete verpackt, neben dem eigentlich zu übertragenen Daten (= Payload) werden Kontrolldaten (= Header) vorangestellt, die den Datenfluss koordinieren helfen und Datenkollision vermeiden. Einzelne Gruppen von Bits im Header haben daher eine bestimmte Bedeutung, die im BUS-Protokoll (wie „Sprache“) festgelegt sind. Der Datenstrom im Header enthält daher Informationen wie:
Ziel- und Quelladresse,
Sychronisationsbytes,
Framelength,
Errorbits, etc
BUS-Topologie
Im technischen Kontext meint der Begriff „Topologie“ auf welche Art Geräte miteinander verbunden sind. Allgemein beschreibt der Begriff „tópos“ [altgr.] die Lage und Anordnung geometrischer Gebilde im Raum. Im Hinblick auf die Datentechnik sind hier drei Verfahren relevant (mehr dazu im Themenbereich „Datennetz“).
Man unterscheidet:
physische Topologie: die räumliche (anfassbar-vorhandene) Verbindung von vernetzten Komponenten.
logische Topologie: Organisation der Kommunikationswege zwischen vernetzten Komponenten.
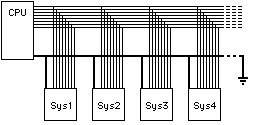
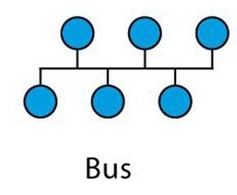
1. BUS-Topologie
Alle Geräte sind über Leitungen miteinander verbunden und gleichwärtig BUS berechtigt. Alle Parallel-BUS Systeme gehören zu dieser Gruppe. Es muss sicher gestellt werden, wie Geräte sich niemals untereinander stören, wenn zwei gleichzeitig senden wollen. Das kann durch den Steuerbus oder durch ein Kollisionsverfahren (CSMA/CD) erfolgen. Ein Beispiel :
KOAX-LAN
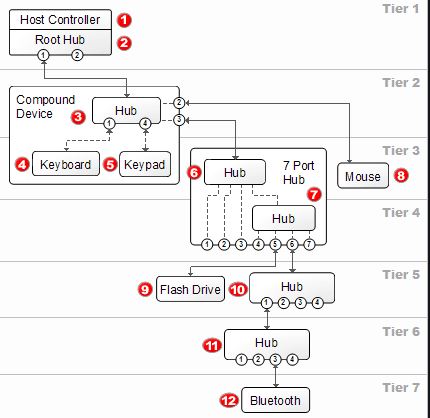
2. Baum-Topologie
Eine zentrale Instanz (Wurzel/root) steuert die Kommunikation. In der DV bezeichnet man diese als HOST (in der Automatisierung MASTER). Über Verteiler (HUBs) dürfen die Devices (Slaves) nur senden, wenn der HOST es „erlaubt“ – oder er „fragt“ sie der Reihen nach ab. Beispiel:
USB-Bus
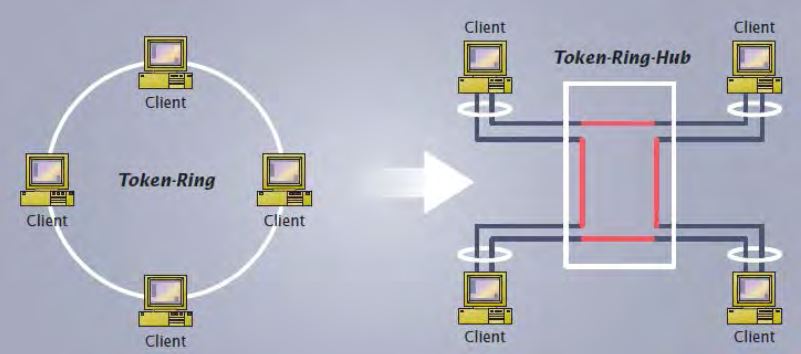
3. Ring-Topologie
Um eine zusätzliche Sicherheit gegen eine mögliche Unterbrechung /Ausfall eines Geräts zu erzielen, schließt man auch Geräte zu einem Ring zusammen. Zur Kontrolle der Buskommunikation wird dann von jedem Gerät ein bestimmtes Bit-Muster im Datenstrom ausgewertet. Das jeweils sendende Gerät verändert es so lange, bis es fertig ist. Dieses Bit-Muster nennt man „Token“. Beispiel:
Toke-Ring LAN
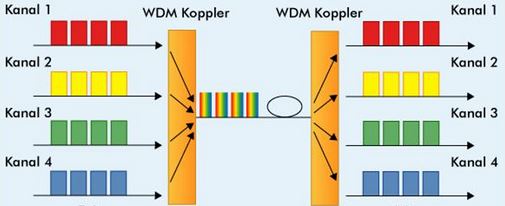
Multiplexing
Dateien bestehen aus vielen Bytes. Sie werden vom Prozessor über den Datenbus an andere Geräte versendet – der Datenbus besteht aktuell aus 64 Busleitungen. Über einen Multiplexer werden die 64 (parallel) vorliegenden Bits der Reihe nach auf eine einzige Datenleiung übertragen und so eines nach dem anderen an das andere Gerät gesentet. Das andere Gerät verfügt über das entsprechende Gegenstück (De-Multiplexer) und verteilt die ankommenden Bits wieder auf sein paralleles (Datenbus) Leitungssystem.
Vorteile serieller Bus
Kabel mit wenigen Leitungen flexibler, dünner.
Steckverbindungen robuster, da kleiner & weniger Kontakte.
leichter handhabbar, da Stecker und Kabel dünner ausfallen.
preiswerter, da nicht so viel Material benötigt wird.
⇒ Eignet sich also besser für Geräte, die am Computer/Mainboard angeschlossen werden.